Research Topics:
Cloud Robotics, Reinforcement Learning, Deep Learning
Main Results:
We focus on robot learning and cloud robotics. It was proved impossible to have the intelligence capability similar to dog brains or human brains within the physical robot itself while keeping the robot as portable as a cell phone. Cloud Robotics with communication mechanisms that are fast and robust to deliver the computing power is a feasible solution. The potential of Cloud Robotics is as huge as one can imagine when a cell-phone sized robot is able to use unlimited resources from the Internet and share its knowledge with its team members. We have been developing a Robotics Application Platform that will allow Integrated Development of software and hardware (RAPID) since 2015.
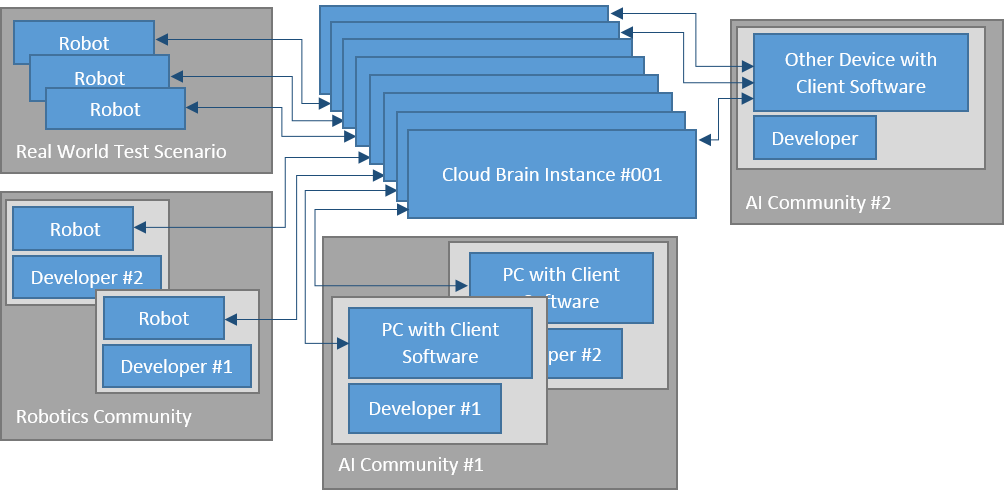
- A computing cloud with GPU, the Cloud Brain, is versatile enough to run a swad of robots at the same time (below figure).

2. A Linux embedded system, the Spinal Cord, to be attached to the actual robot deployed in the field is handling the communication and control.
3. The Human-Robot Interface is used for feedback and interaction with the general algorithm residing in the cloud.

Based on open-source hardware and software, the system was built from nearly bottom level developments in order to make this system more efficient and more versatile. Fully customized Linux in the “Spinal Cord” was specially designed to conquer cloud robotics challenges. High resolution video and audio streaming is fast and robust enough for cloud robotics. Newly defined communication mechanism which we call “Impulse” makes control signal communication robust and in real time even over the Internet. Cutting-edge computer vision and machine learning software platforms are equipped in the Spinal Cord, Local Brain and Cloud Brain. Local Brain is designed to have the capability of taking over the robot to deal with communication interruptions with the Cloud Brian. Knowledge (Data and machine learning models) are shared between robots. Furthermore, work is shared between researchers and developers, and Applications are delivered to the users at the lowest cost.
Applications:
Experimental Platform for AI and Neuroscience Research
We are cooperating with other researchers in the field of AI and neuroscience to develop models which would behave like natural nervous systems.
Consumer Electronics Market Applications
The potential of this system to be commercialized as a consumer electronics product is beyond our imagination. The local robot device is equipped with hardware and software more capable than the best tablet computer on the current market.
Possible Applications on Existing Military Robots
- Smarter local "brain”, running advanced algorithms, e.g. face recognition
- Share knowledge via the Cloud with other robots to continue its mission after being destroyed or lost.
- Operate remotely – using a military network or the Internet, one can operate the robot from anywhere via the Cloud
Researchers:
Current:
- Ionut Florescu, Advisor, ifloresc@stevens.edu
- Zheng Xing, Project Manager & Developer,zxing@stevens.edu
- Zhiyuan Yao, RL Researcher & Developer, zyao9@stevens.edu
- Vardaan Kishore Kumar, RL Researcher & Developer, vkishore@stevens.edu
- Tianye Qi, RL Researcher & Developer, qitianye1104@gmail.com
- Jiarui Li, ROS Developer, jli148@stevens.edu
- Chenglin Wu, ROS Developer, cwu15@stevens.edu
- Chenhao Wei, ROS and RL Developer, wchweichenhao@gmail.com
- Shiwei Zeng, Reinforcement Learning Researcher, szeng4@stevens.edu
Former:
- Hamid Hekmatian, Deep Learning Developer, hhekmati@stevens.edu
- Ekkasit Pinyoanuntapong, ROS and Web Interface Developer, epinyoan@stevens.edu
- Gary Engler, Deep Learning Developer,gengler@stevens.edu
- Sebastian Tudor, Control Specialist & Algorithm Developer,studor@stevens.edu
- Lalita Gajbe, Developer,lgajbe@stevens.edu
- Yunfeng Wei, Developer, ywei14@stevens.edu
- Greg Ota, Developer, gota@stevens.edu
Publications:
Z. Xing, H. Hekmatian, E. Pinyoanuntapong, I. Florescu, "RAPID: an Open Cloud Robotics Platform", working paper, 2017
Hekmatian H., Z. Xing, I. Florescu, "Can we learn how Deep Learning works? An application using Plant Species Recognition and Transfer Learning", working paper, 2017